Robotergestützte Montage eines Schaltergehäuses
Elektrotechnik-Projekt
Studentische Projektleitung:
- Max Tönjann, Elektrotechnik (B.Sc.)
Projektmitglieder:
- Niklas Spreen, Elektrotechnik (B.Sc)
- Marco Altvogt, Elektrotechnik (B.Sc.)
- Patrick Winter, Elektrotechnik (B.Sc.)
- Tom Bruns, Elektrotechnik (B.Sc.)
- Leon Igelbrink, Elektrotechnik (B.Sc.)
- Lukas Heeke, Elektrotechnik (B.Sc.)
Betreuer:
- Prof. Dr.-Ing. Dirk Rokossa
- Dipl.-Ing. Martin Nardmann
Vor dem Hintergrund steigender Anforderungen an Effizienz, Qualität und Wettbewerbsfähigkeit gewinnt die Automatisierung in der industriellen Fertigung zunehmend an Bedeutung.
Genau an diesem Punkt setzt dieses studentische Projekt an. Die Studierenden entwickeln eine automatisierte Fertigungslinie zur Montage eines Schaltergehäuses und kombinieren dabei stationäre und mobile Robotik. Die Steuerung und Überwachung des Montageprozesses erfolgt über eine intelligente Steuerung, ein Cypher-Physisches-System, das Roboter und Werkstückträger vernetzt und die Montageschritte situationsabhängig koordiniert. Neben der Planung und Umsetzung des Prozesses programmieren die Studierenden die Roboter selbst und konstruieren projektspezifische Werkzeuge.
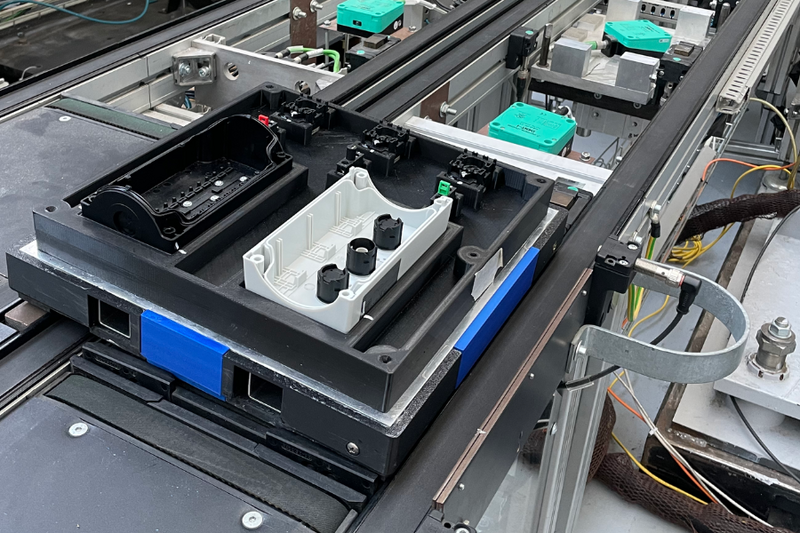
Die stationären Roboter übernehmen präzise Montageaufgaben entlang des Förderbands und bestücken die Gehäusehälften mit Bauteilen. Ein mobiler Roboter transportiert anschließend den Werkstückträger selbstständig zur nächsten Arbeitsstation, an welcher die finale Verschraubung erfolgt und der Fertigungsprozess beendet wird.
Das Projekt kombiniert Robotik, Konstruktion und Automatisierungstechnik und vermittelt praxisnahe Einblicke in industrielle Fertigungsprozesse im Sinne der Industrie 4.0. Das Team hat dabei wertvolle Erfahrungen an realitätsnahen Aufgabenstellungen gesammelt und mit Technologien gearbeitet, die in der modernen Produktion eine immer größere Rolle spielen.
Projektbilder