TESS – Teilautomatisiertes selbststabilisierendes System
Elektrotechnik-Projekt
Optimal geregelt, stabil in jeder Lage
Studentische Projektleitung:
Johannes Krause (Elektrotechnik, M.Sc.)
Projektmitglieder:
- Linus Blanke (Elektrotechnik, M.Sc.)
- Tim Buddemeier (Elektrotechnik, M.Sc.)
- Justus Wiegard (Elektrotechnik, M.Sc.)
Betreuer:
Prof. Dr. Ansgar Rehm
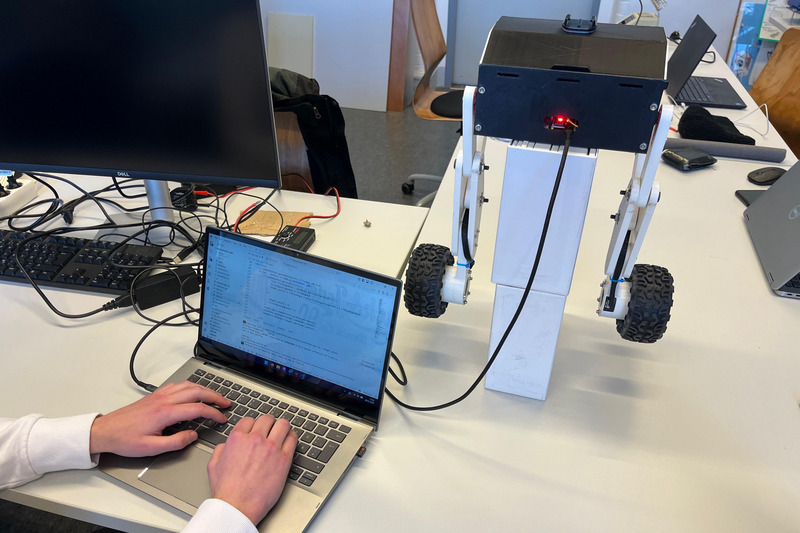
TESS, das Teilautomatisierte Selbststabilisierende System, ist ein zweirädriger, aufrecht fahrender und ferngesteuerter Roboter. Das Projekt umfasst die vollständige Konstruktion, Fertigung im additiven Verfahren und die Entwicklung der anwendungsbezogenen Software.
TESS zeigt, wie mobile Systeme Menschen künftig dort helfen können, wo das Gelände eng, uneben oder steil ist. Mit einer variablen Höhe von bis zu 45 cm und 3 kg Gewicht bewegt sie sich wendig und sicher durch Umgebungen, in denen andere mobile Plattformen an ihre Grenzen kommen. Die integrierte Sensorik erfasst präzise Lage- und Bewegungsdaten, sodass TESS dank der optimalen Zustandsregelung Schräglagen eigenständig ausgleicht und bei Störungen stabil bleibt.
Die kräftigen Radmotoren lassen TESS Steigungen von annähernd 100 % erklimmen, wobei sie durchgehend kontrollierbar bleibt und ihr Gleichgewicht hält. Moderate Lasten wie Kameras oder weitere Sensoren können durch Anwinkeln der Beine stufenlos auf die passende Arbeitshöhe gebracht werden, um Blicke über Kanten oder unter Maschinen zu werfen. Das macht TESS zu einem Erkundungssystem für riskante und schwer zugängliche Bereiche, wodurch die Risiken für Menschen bei der Inspektion unbekannter Umgebungen minimiert werden. Schon heute erhält TESS ihre Fahrbefehle per Fernsteuerung. In einem nächsten Schritt kann diese Basis zur (teil-)autonomen Navigation ausgebaut werden.
So steht TESS exemplarisch für „Lösungen für die Welt von morgen“. Sie verbindet intelligente Regelungstechnik mit praktischer Mobilität und zeigt, wie Standard-Hardware-Komponenten dank geeigneter Software zu einem leistungsfähigen Endprodukt verschmelzen. Gleichzeitig bietet sie eine Lern- und Entwicklungsplattform, auf der neue Assistenzfunktionen, bessere Mensch-Roboter-Interaktionen und andere Mobilitätskonzepte weiterentwickelt werden können.
Projektbilder