Roboter an! Parkour frei? Action mit 5G dabei!
Elektrotechnik-Projekt
Studentische Projektleitung:
- Jorit Welzel (Elektrotechnik, M.Sc.)
Projektmitglieder:
- Pia Droste (Elektrotechnik, M.Sc.)
- Nahla Alhussen (Elektrotechnik, M.Sc.)
- Lea Meyer zu Hörste (Elektrotechnik, M.Sc.)
- Duc Anh Tran (Elektrotechnik, M.Sc.)
- Jonathan Sieweke (Elektrotechnik, M.Sc.)
Betreuer:
- Prof. Dr.-Ing. Ralf Tönjes
- Felix Kahmann
- Andreas Linz
Das Ziel dieses Projekts ist es, einen „Go 2“-Laufroboter der Firma „Unitree“ so zu erweitern, dass er sich autonom zu einem vorbestimmten Ort bewegen kann. Er soll auf dem Weg liegende Hindernisse selbst oder gegebenenfalls durch menschliche Hilfe umgehen. Der Roboter kann außerhalb des Bildungs- und Forschungssektors beispielsweise zum Sammeln von Proben in Landwirtschafts- oder Krisengebieten dienen und dabei unwegsames Gelände überqueren.
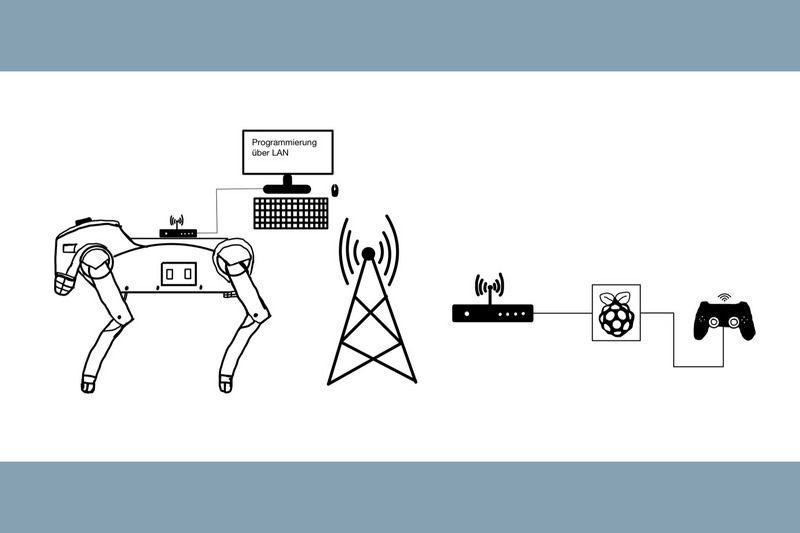
Um dieses Ziel zu erreichen, muss der Laufroboter Hindernisse besser erkennen können als in der bereits standardmäßig implementierten Hinderniserkennung. Kommt der Roboter nicht selbstständig um das Hindernis herum, soll er ein Signal senden und aus der Ferne über einen Controller um dieses herumgesteuert werden. Die Position des Roboters soll live getrackt werden, um die momentane Position relativ zur Zielposition bestimmen zu können. Die Kommunikation zwischen allen Geräten soll über 5G erfolgen.
Projektbilder