Greifen, Platzieren, Vernetzten - SCARA-Robotik in der verteilten Produktion
Elektrotechnik-Projekt
Studentische Projektleitung:
- Julius Driehaus (Elektrotechnik, B.Sc.)
Projektmitglieder:
- Thomas Müseler (Elektrotechnik, B.Sc.)
- Fabian Schluch (Elektrotechnik, B.Sc.)
- Lukas Bröckel (Elektrotechnik, B.Sc.)
Betreuer:
- Prof. Dr. Siegmar Lampe
- Bernhard Neugebauer
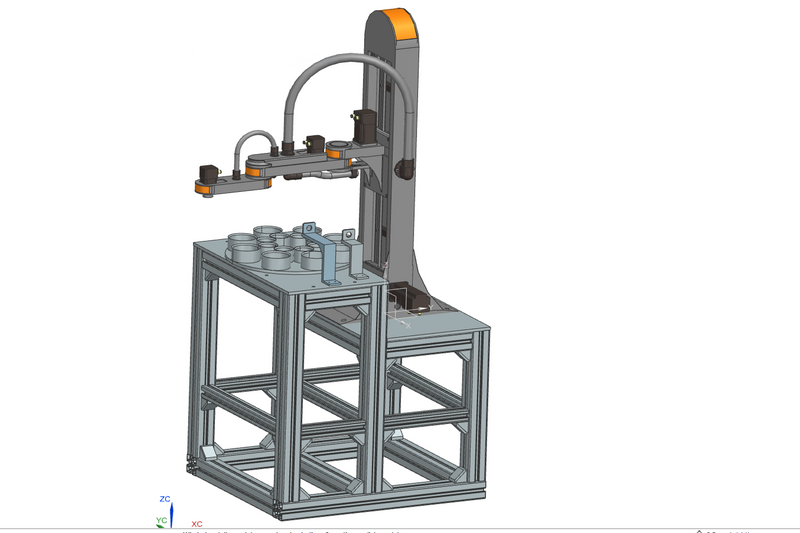
Das Projekt beschäftigt sich mit der Integration und Inbetriebnahme eines SCARA-Roboters innerhalb einer automatisierten Laborumgebung. Der Roboter übernimmt dabei die Aufgabe, abgefüllte Farbbehälter aus einer Produktionsstation zu entnehmen und an eine definierte Lagerposition zu überführen.
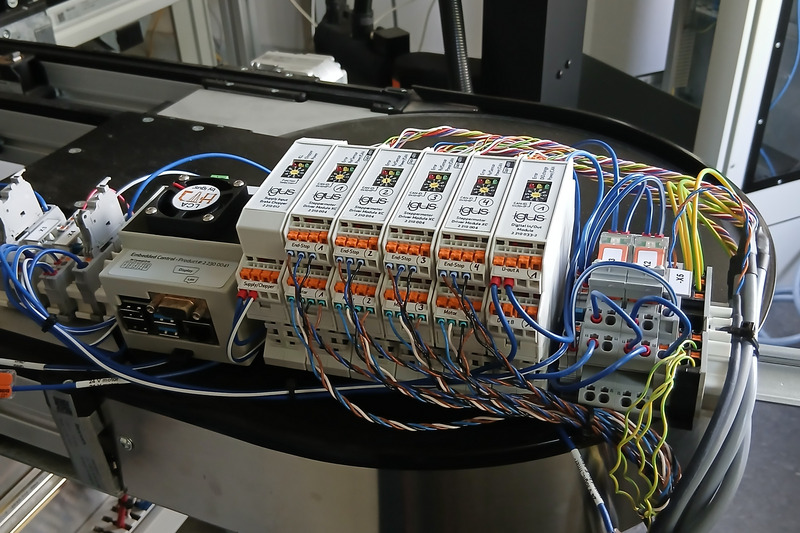
Ein zentrales Ziel des Projektes ist es, die einzelnen Arbeitsschritte des Roboters präzise zu programmieren und ihn mechanisch sowie elektrisch an die bestehende Anlage anzubinden. Hierzu zählen auch die Entwicklung und Auswahl eines geeigneten Greifers sowie der Aufbau eines kompakten Lagersystems zur Zwischenlagerung.
Durch das Projekt hat das Projektteam Einblicke in die praktische Umsetzung moderner Automatisierungskonzepte im Kontext von Industrie 4.0 erhalten - von der realen Hardware bis hin zur virtuellen Simulation.
Projektbilder