OSCAR – Autonomes Modellfahrzeug
Interdisziplinäres Projekt
Studentische Projektleitung:
- Leon Aschemann
Projektmitglieder:
- Eric Everwin
- Marcell Kuhlenbeck
- Dominik Hartmann
- Marc Oldekamp
- Robin van Buren
- Maximillian Jarzyna
- Adrian Wübbelmann
- Lilly Noack
- Robin Becker
Betreuer:
- Prof. Dr.-Ing. Winfried Gehrke
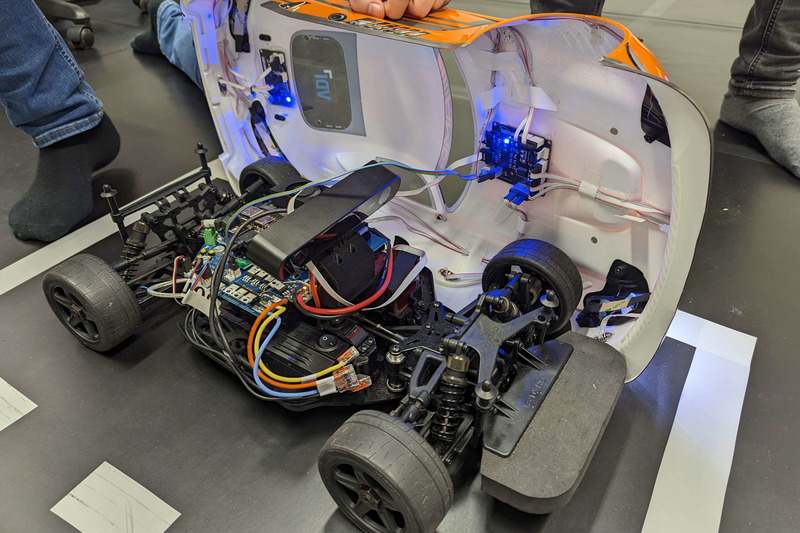
In der Automobilbranche nimmt das autonome Fahren eine zunehmend wichtige Rolle ein. Auch das OSCAR-Projekt beschäftigt sich seit über acht Jahren mit diesem Thema. Im Projekt soll ein Modellauto im Maßstab 1:8 auf einer Rennstrecke automatisch die Spur verfolgen, selbstständig in die Boxengasse fahren sowie eigenständig Ein- und Ausparken.
Nachdem die Hochschule im letztjährigen VDI-Wettbewerb den vierten Platz belegt hat, ist das Ziel dieses Jahr "das Treppchen". Das zehnköpfige Team aus den Studiengängen Technische Informatik, Medieninformatik und Elektrotechnik nahm sich der Herausforderung an, auf der Arbeit des letzten Teams aufzubauen und das Fahrzeug weiter zu verbessern.
Im Vordergrund dabei stand zum einen die Zusammenführung der Hardware-Architektur auf einen einzigen leistungsstarken Mikrocontroller. Dies ermöglichte außerdem einen weitgehend modularen Aufbau, wodurch defekte Sensoren u. ä. schnell ausgetauscht werden konnten. Weiterhin wurde durch die Bearbeitung der Kameraaufnahmen eine bessere Spurerkennungsrate erreicht. Schlussendlich wurde das Aus- und Einparken komplett überarbeitet, um eine höhere Zuverlässigkeitsrate zu gewährleisten.
Projektbilder


Projektvideo
