Forschungsprojekt: Sensordaten
Auswertung von fahrzeugseitig erfassten Sensordaten
Kooperation: Fa. Robert Bosch GmbH, Hildesheim
1. Aufgabenstellung
Neuere Versuche der Verkehrstechnik beschäftigen sich mit der automatischen Erfassung von Fahrzustands- und Umfeldinformationen durch Nutzung der im Verkehrsgeschehen fahrenden Fahrzeuge als mobile Sensoren. Ziel dieses Projektes ist die Erfassung, Analyse und Auswertung von Daten im Fahrzeug während der Fahrt, um hieraus Informationen zum Verkehrs- und Straßenzustand abzuleiten. Diese werden nach Ermittlung an eine Zentrale zur weiteren Information und Warnung an andere Verkehrsteilnehmer weitergeleitet.
2. Tätigkeiten
1. Konzeption und Realisierung eines GPS - Programms
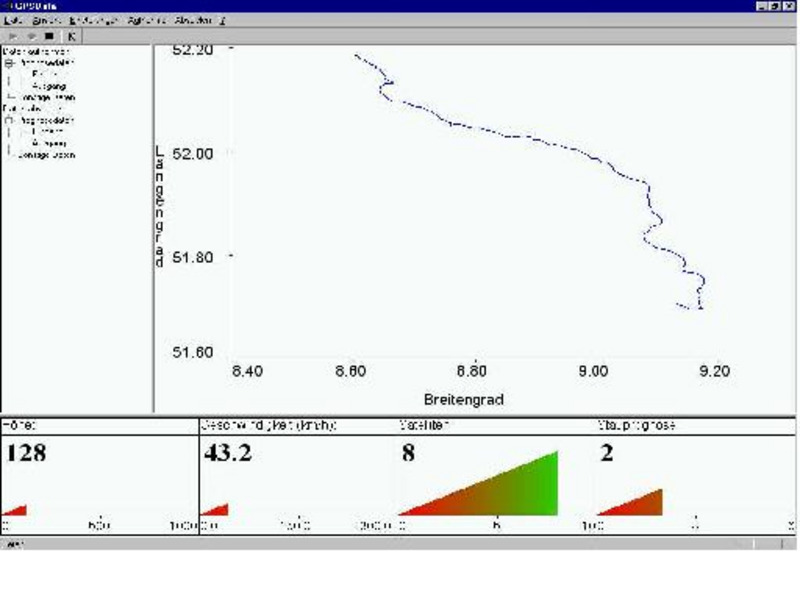
Es wurde ein Programm für ein Notebook im Fahrzeug entwickelt, mit dem sowohl Datenaufzeichnungen während der Fahrt als auch Testfahrten zur Überprüfung der Modelle möglich sind. Das Programm empfängt mittels serieller Schnittstelle GPS-Signale und dekodiert hieraus insbesondere Ortungsdaten, Geschwindigkeitsdaten und Krümmungsverhalten des Straßenverlaufs. Mit einem speziellen Testfahrzeug ist auch die Aufnahme zusätzlicher Sensorsignale wie z.B. Regensensor, Lichtschalterstellungen, Scheibenwischerstellungen möglich. Das Programm bietet eine grafisch interaktive Benutzerschnittstelle und ist einer Verwendung im Fahrzeug angepasst. Im Simulationsmodus können gespeicherte Fahrten nachgefahren werden. Es wurde in Visual C++ entwickelt.
3. Modellbildungen mit Hilfe wissensbasierter Methoden
Es wurden drei Modelle realisiert.
a) Es wird mit Hilfe neuronaler Netze der Straßentyp Autobahn (BAB), Landstraße oder Stadt auf der Basis aktueller Geschwindigkeitsverläufe und Fahrtrichtungsänderungen prognosti-ziert. Die Genauigkeit liegt bei 8-9%. Diese Aussage ist für anschließende Fragestellungen von Bedeutung.
b) Es wurde ein Modell zur Prognose der Verkehrsqualität erstellt und in obiges Programm integriert. Dieses nutzt vorhandenes Wissen in Form von Fuzzy-Regeln und klassifiziert den laufenden Verkehr in 6 mögliche Zustände
c) Ein weiteres Modell prognostiziert auf der Basis von Fuzzy-Regeln den Fahrbahnzustand mit Gefahrenhinweisen hinsichtlich Eisglätte, Schneeglätte, Aqua Planing. Dieses Modell konnte jedoch auf Grund von fehlenden Witterungsvoraussetzungen mit dem Testfahrzeug der Fa. Bosch GmbH noch nicht im laufenden Betrieb getestet werden.
Diplomarbeiten im Rahmen des Teilprojektes:
[1] Auswertung von Sensordaten mit Hilfe künstlicher Intelligenz; Martin Egbers, Torsten Franz, Diplomarbeit FH Osnabrück 1999.
[2] Erkennung der Verkehrsqualität mit Hilfe künstlicher Intelligenz; Andreas Wuchrer, Diplomarbeit FH Osnabrück 2000.