Schneckengetriebe
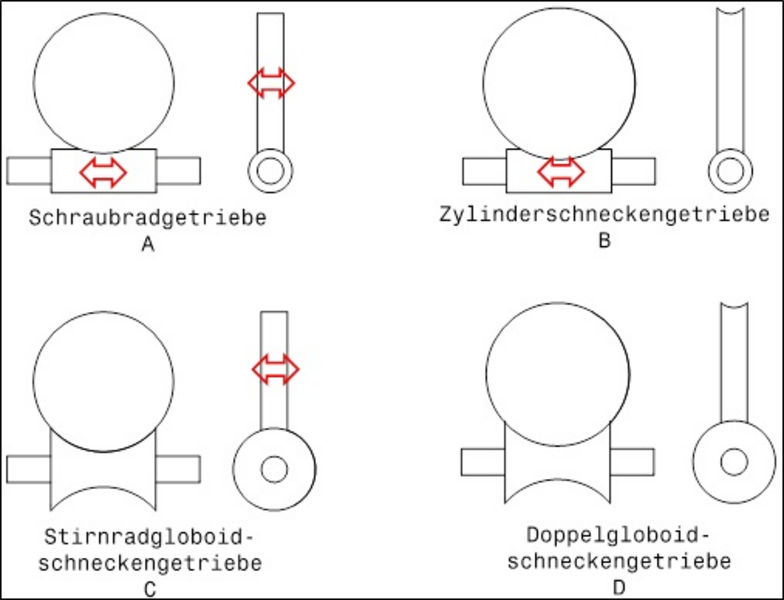
Schneckengetriebe mit einem Achskreuzungswinkel von 90° unterscheiden sich durch die Form von Schnecke und Schneckenrad. Diese kann zylindrisch oder globoidisch sein. Somit ergeben sich 4 Alternativen, die im Bild dargestellt sind. Dabei symbolisieren die roten Pfeile eine Verschiebbarkeit in Achsrichtung.
An unserem Labor können für alle hier gezeigten Varianten hochgenaue CAD-Geometrien erzeugt werden. Diese können zur Herstellung oder Optimierung verwendet werden. Selbstverständlich werden die Geometrien mit Hilfe des Tragbildes überprüft. Bei Interesse schicken Sie bitte eine e-mail.
siehe auch: Veröffentlichung
A - Schraubradgetriebe
Schraubradgetriebe bestehen aus einem zylindrischen Radkörper und einer zylindrischen Schnecke. Dabei ergibt sich ein Berührbild in Form eines Punktes.
B - Zylinderschneckengetriebe
Bei Variante B wälzt ein globoidisches Schneckenrad mit einer zylindrischen Schnecke. Die so entstehenden Berührlinien verlaufen entlang der Breite des Rades.
Die Animation zeigt eine sogenannte Duplex-Verzahnung, die eine veränderliche Zahndicke der Schnecke über ihrer Länge aufweist. Dadurch ist eine spielfreie Einstellung möglich.
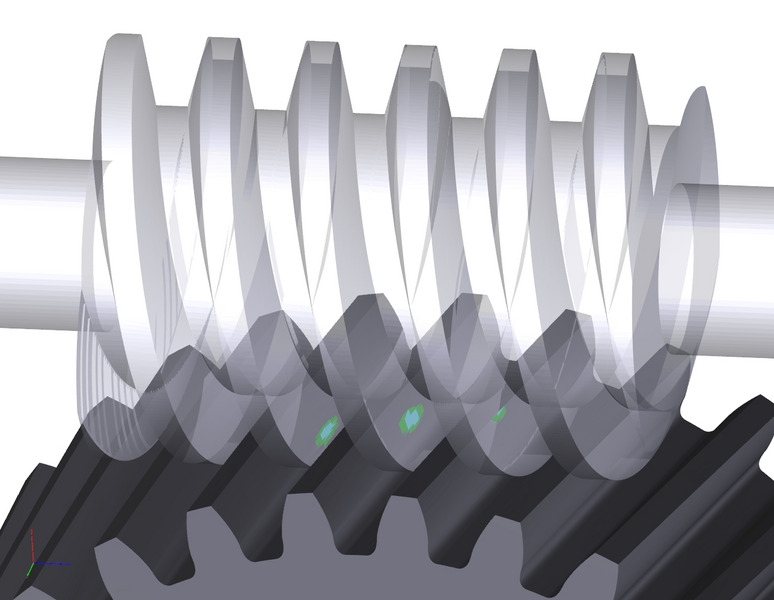
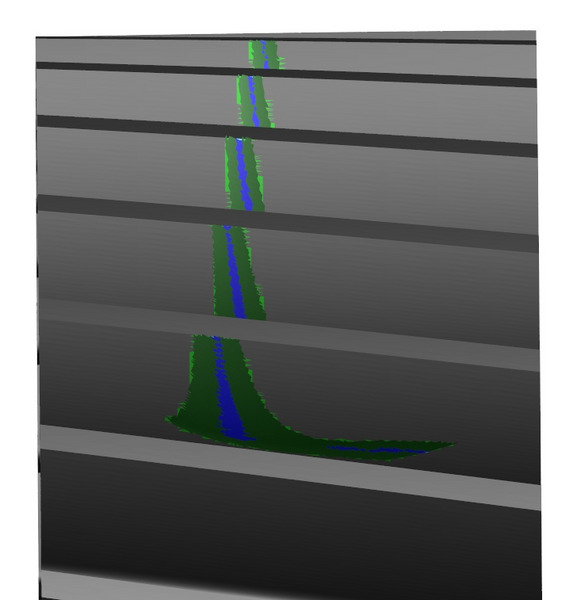
C - Stirnradgloboidschneckengetriebe
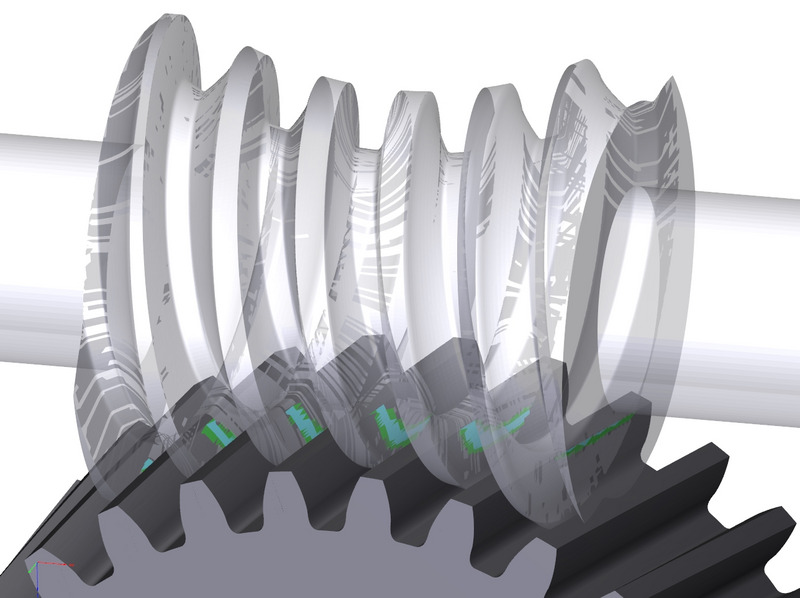
Bei den Stirnradgloboidschneckengetrieben wird ein konventionelles schrägverzahntes Stirnrad mit einer globoidischen Schnecke gepaart. Das Schneckenrad ist also zylindrisch, die Schnecke globoid. Dies hat den Vorteil, dass beim Rad auf die üblichen Herstellverfahren zurückgegriffen werden kann und eine axiale Verlagerung des Rades zu keiner Störung der Eingriffsverhältnisse führt. Demgegenüber ist die Fertigung der Schnecke aufwändig. Das Bild zeigt die Berührlinien, die im wesentlichen vom Zahnkopf zum Zahnfuß verlaufen. Beim Durchwandern des Berührgebietes wandern sie von der Einlaufseite zur Zahnmitte. Gut zu erkennen ist ebenfalls das Tragen über viele Zähne. Eine am Labor entwickelte Software generiert solche Schnecken. Die zugehörigen Stirnräder können ebenfalls mit der Software modelliert werden. Dabei ist es möglich die Zahndicken auf Schnecke und Rad unterschiedlich aufzuteilen, also zum Beispiel dünnere Zähne an der Schnecke und dickere Zähne am Rad.
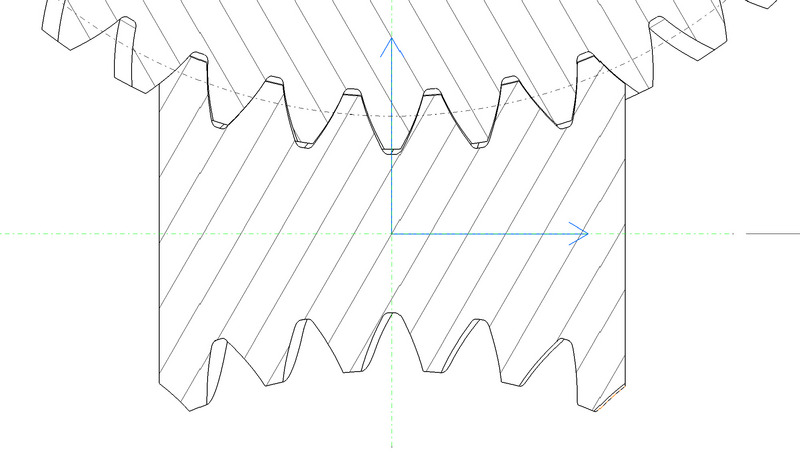
Herstellung von Stirnradgloboidschnecken
Stirnradgloboidschnecken wurden bislang meistens durch Schaben hergestellt. Aufgrund der umständlichen Fertigung konnte sich bislang diese Getriebeart noch nicht durchsetzen.
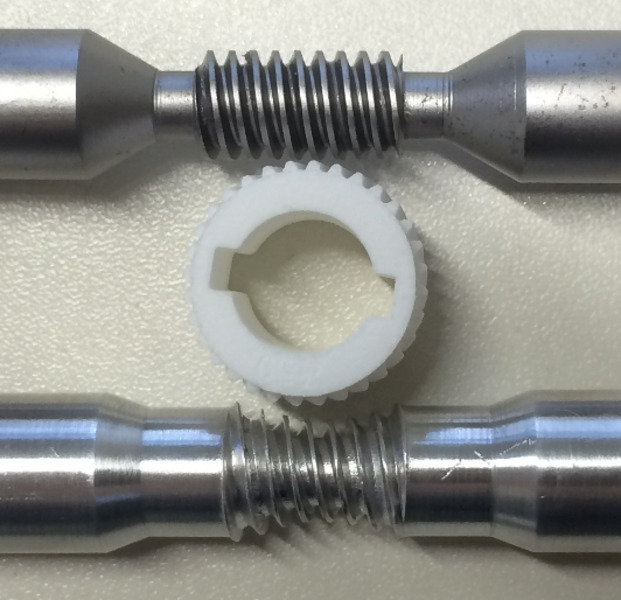
Mit exakten CAD-Modellen ist es für geringe Stückzahlen möglich die Schnecken auf Universalfräsmaschinen mit konventionellen Kugelfräsern herzustellen. Das Bild zeigt eine mit diesem Verfahren hergestellte Zylinderschnecke (oben).
Für Schnecken in Kleinstantrieben, die in großen Stückzahlen benötigt werden, wurde am Labor ein Kaltumformverfahren entwickelt. Im unteren Teil des Bildes ist eine so gerollte Schnecke abgebildet. Darunter sieht man den Walzvorgang auf dem laboreigenen Prüfstand. In solchen Antrieben wird in der Regel ein Schneckenrad aus Kunststoff verwendet.
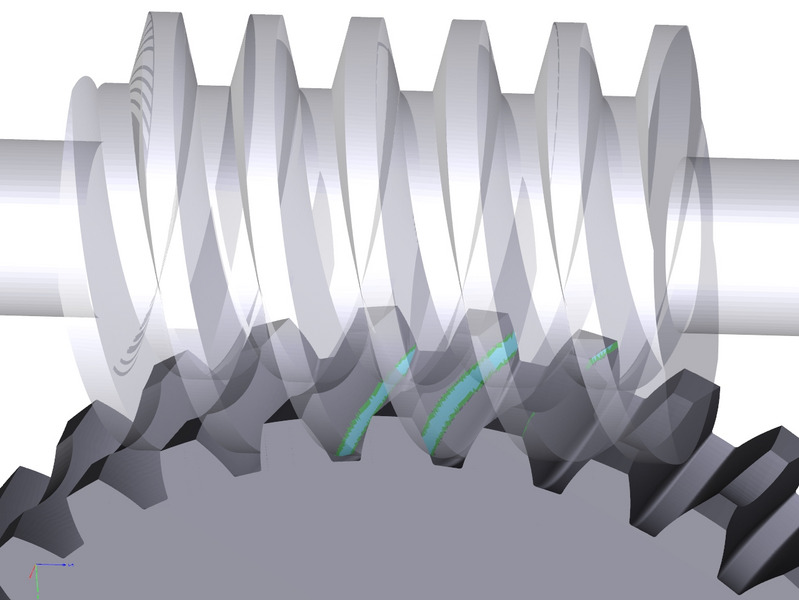
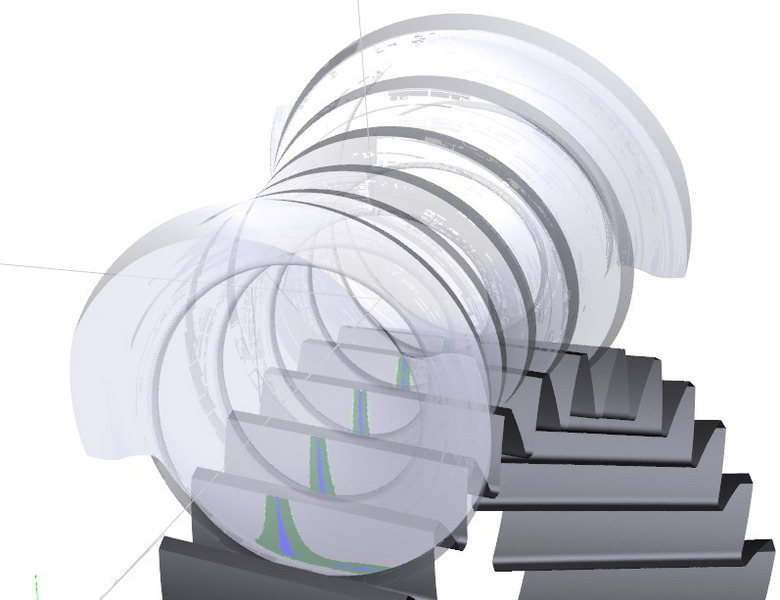
D - Doppelgloboidschneckengetriebe
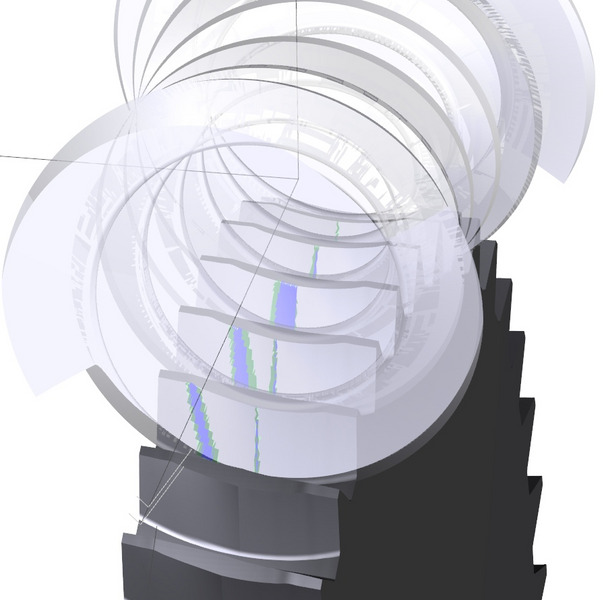

Bei den Doppelgloboidschneckengetrieben wird eine globoidische Schnecke mit einem globoidischen Rad gepaart. Im klassischen Fall liegt dabei im Achsschnitt der Schnecke eine geradlinige Flanke an beiden Zahnrädern vor. Die Herstellung der Schnecke ist dabei durch Drehen realisierbar. Hier ist es die Fertigung des Rades die komplexer ist. Bei vereinfachten Herstellungsmethoden kann es zu Eingriffsstörungen kommen. Deswegen ist eine präzise Fertigung mit Hilfe der dreidimensionalen CAD-Modelle empfohlen.
Das Bild zeigt durch die transparente Schnecke ebenfalls Berührlinien, die in Zahnhöhenrichtung verlaufen. Zu Beginn des Eingriffs liegen zwei Berührlinien nebeneinander vor, die sich im weiteren Verlauf aufeinanderzu bewegen und in der Zahnmitte treffen. Die eigens dafür entstandene Software kann sowohl Schnecken als auch Schneckenräder mit dieser Geometrie erzeugen.