OSCAR – Entwicklung und Realisierung eines Reglers für bürstenlose Gleichstrommotoren
Elektrotechnik-Projekt
Studentische Projektleitung:
- Marcel Möller, Elektrotechnik (B. Sc.)
Projektteam:
-
Tim Buschermöhle, Elektrotechnik im Praxisverbund (B.Sc.)
-
Daniel Müller, Elektrotechnik im Praxisverbund (B.Sc.)
-
Björn Overesch, Mechatronik (B. Sc.)
-
Karina Wildeis, Elektrotechnik im Praxisverbund (B.Sc.)
Module:
-
Elektrotechnik-Projekt;
-
Mechatronik-Projekt
Betreuer:
-
Prof. Dr. Winfried Gehrke
OSCAR ist der Name eines autonom fahrenden Modellfahrzeugs im Maßstab 1:10, welches von Studierenden der Hochschule Osnabrück realisiert wird. Das Ziel dieser Aktivität ist die Teilnahme am Carolo-Cup, einem internationalen Wettbewerb, der jährlich von TU Braunschweig ausgerichtet wird. Studentische Teams stellen ihre autonom fahrenden Modellfahrzeuge vor und messen sich in verschiedenen Disziplinen, die dem realen Straßenverkehr nachempfunden sind. Den besten Teams winken Preisgelder in vierstelliger Höhe.
In diesem Semester stand die Überarbeitung des Antriebs auf dem Programm. Die Nachteile der bisher verwendeten Standard-Modellbau-Komponenten zur Ansteuerung des Antriebsmotors sollten durch die Entwicklung einer eigenen Motoransteuerung vermieden werden. Fünf Studierende aus den Studiengängen Elektrotechnik, Elektrotechnik im Praxisverbund und Mechatronik haben sich im Rahmen des Projektes mit der Hardware und Software zur Regelung von bürstenlosen Gleichstrommotoren beschäftigt.
Hierfür hat sich das zweiköpfige Subteam „Software“ in die Programmierung des modernen Mikrocontrollers aus der STM32-Familie eingearbeitet und ein Verfahren zur Ansteuerung bürstenloser Gleichstrommotoren umgesetzt. Das Subteam „Hardware“ fokussierte sich auf die Auswahl der elektronischen Komponenten und den Entwurf einer Testplattform und eines Prüfstandes, der die Softwareentwicklung unterstützen sollte.
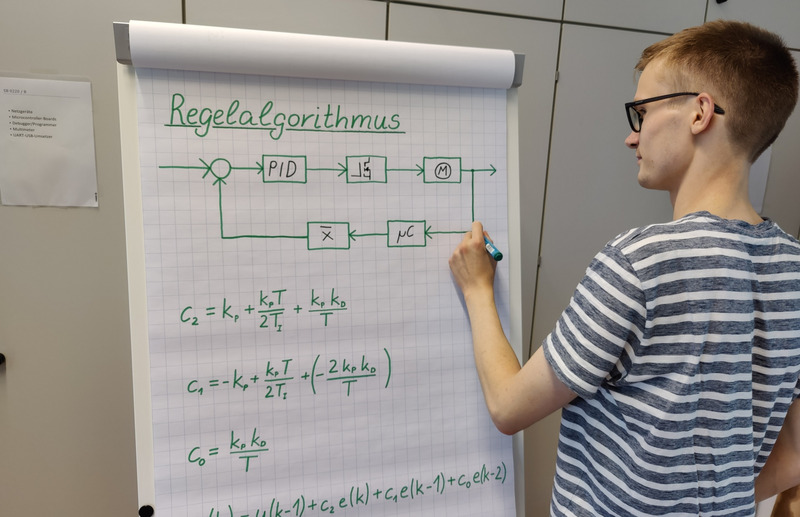
Das Projektteam erarbeitete zunächst eine einfache Motoransteuerung mit konstanter Drehzahl, die sukzessive erweitert wurde. Um ein möglichst gutes Fahrverhalten zu erreichen, wurde unter anderem eine digitale Drehzahlregelung realisiert. Darüber hinaus wurde die Kommunikation überarbeitet, so dass dem übergeordneten Steuercomputer Informationen wie die aktuelle Drehzahl oder die zurückgelegte Wegstrecke über einen digitalen Kommunikationskanal zur Verfügung gestellt werden.
Die Ergebnisse wurden in das bestehende OSCAR-Konzept integriert. Hierzu wurde für die Sensorik und Aktorik eine neue Platine entworfen, in die nun auch die Motoransteuerung integriert ist. Auf diese Weise konnte der knappe zur Verfügung stehende Platz auf dem Modellauto effizient genutzt werden.
Das Gesamtsystem, bestehend aus Steuercomputer, Motorregler und Motor, konnte erfolgreich in Betrieb genommen werden. Damit steht zukünftigen OSCAR-Teams eine Plattform zur Verfügung, die eine stabile Basis für die weiteren Entwicklungen darstellt.
Projektbilder


Projektvideo