Eine Lichtgestalt im Hochschullabor: Zweiarmroboter montiert Autoscheinwerfer Freitag, 9. August 2013

Master-Studierende der Hochschule Osnabrück präsentieren im Labor für Handhabungstechnik und Robotik richtungweisende Projekt-Ergebnisse
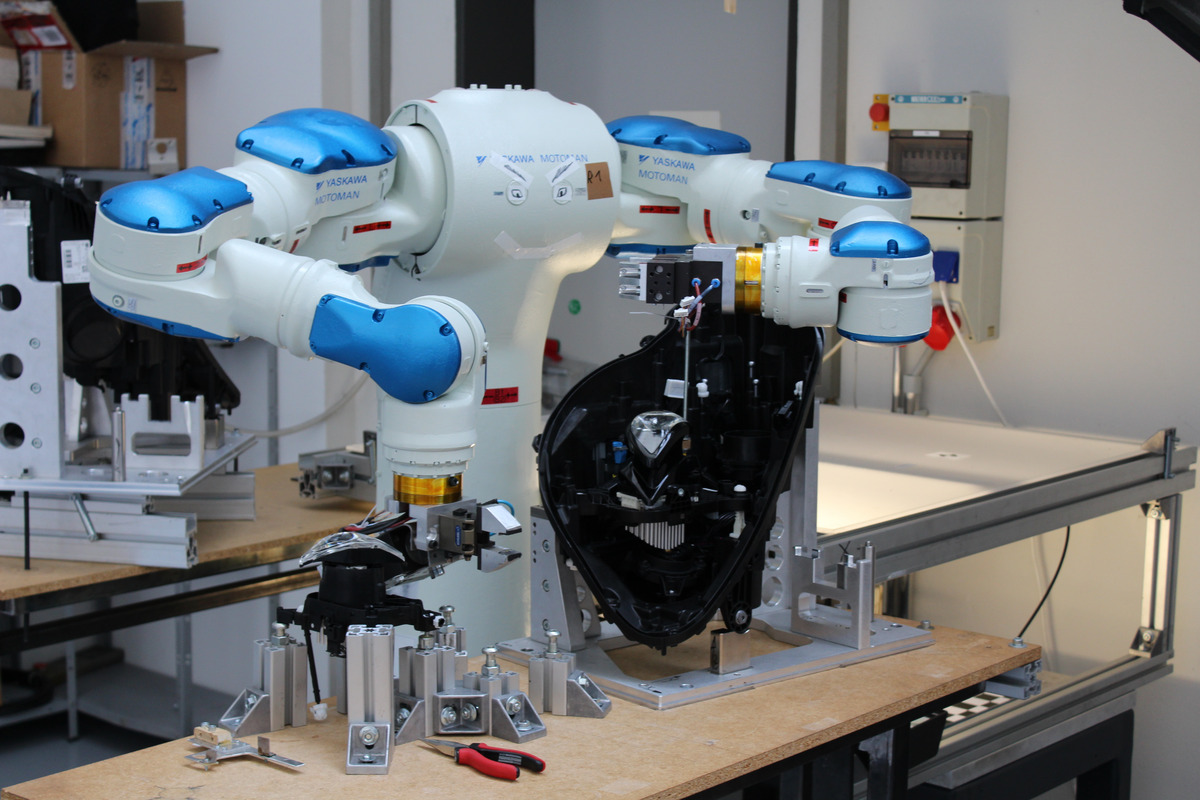
Aufgebaut im Labor für Handhabungstechnik und Robotik der Hochschule Osnabrück sieht er aus wie von einem anderen Stern – und tatsächlich verrichtet er Arbeiten, die für automatisierte Fertigungsprozesse perspektivisch eine neue Dimension bedeuten könnten: Vier Master-Studierende des Studiengangs Entwicklung und Produktion im Bereich Maschinenbau präsentierten jetzt, wie ein Zweiarmroboter Scheinwerfergehäuse für Pkw transportiert und einsetzt sowie – in einem weiteren Schritt – Abblendlicht- und Fernlichtmodul montiert. Das Projekt unter der Federführung von Prof. Dr.-Ing. Dirk Rokossa erfolgte in Zusammenarbeit mit dem Unternehmen HELLA KGaA Hueck & Co. Der HELLA-Konzern entwickelt und fertigt im Geschäftssegment Automotive Komponenten und Systeme der Lichttechnik und Elektronik und zählt weltweit zu den führenden Automobilzulieferern.
„Das, was ich heute gesehen habe, ist aus meiner Sicht sensationell“, sagt Thomas Röbbecke, der bei HELLA im Bereich Scheinwerfermontageplanung sowie Grundlagen und Robotik tätig ist. „Bisher war es nicht vorstellbar, derart komplexe, sich immer wieder verändernde Gehäuse-Formen auf diese Weise zu greifen und dann bestimmte Prozesse wie schrauben und rasten auszuführen.“ Rokossa ergänzt: „Es gibt unzählige Varianten von Scheinwerfergehäusen. Bei einem einarmigen Roboter bedeutet das, für jedes neue Gehäuse im Produktionsprozess einen neuen Greifer zu entwickeln, der an vielen Stellen anfasst.“ Das hieße, immer wieder schwere, komplexe Gebilde anfertigen zu müssen. „Bei einem Zweiarmroboter hingegen genügt der klassische, wesentlich kostengünstigere Einfachgreifer“, erläutert Rokossa. Der Roboter greift in das Klebebett, also die Vertiefung, die den Scheinwerfer umfasst. Der Clou: „Dieses Klebebett ist bei allen Scheinwerfer-Modellen gleich.“
Und wie weiß der Zweiarmroboter SDA10 von Yaskawa nun, wo er anfassen muss? Dazu haben die Studierenden ein Vision-System eingesetzt. Vereinfacht ausgedrückt: Ein 2D-Kamerasystem macht eine Aufnahme vom definierten Arbeitsbereich. Dieses Bild wird an das Vision-Programm übertragen. Die markanten Geometrien des Scheinwerfergehäuses werden erkannt, sodass der Roboter in einem späteren Schritt die Greifpunkte anhand eines Gehäuse-Koordinatensystems anfährt.
Drei Monate lang haben die Studierenden Jan-Cedric Hembrock, René Schwarze, Michael Untiedt und Jörn von Kampen an dem Projekt gearbeitet. „Es war eine klassische, prototypische Untersuchung: Ist es möglich, für diesen Arbeitsprozess menschliche Bewegungsab-läufe nachzubauen?“, erläutert Rokossa. Das Ergebnis hat die Vertreter des Unternehmens HELLA überzeugt. Röbbecke stellt insgesamt fest: „Die Zusammenarbeit unserer Firma mit der Hochschule Osnabrück hat sich sehr gut entwickelt. Schon einige Grundlagenprojekte haben zu Ergebnissen geführt, die dann weltweit zum Einsatz kommen.“
Weitere Informationen:
Ansprechpartner: Prof. Dr.-Ing. Dirk Rokossa
Tel.: 0541 969-2195
E-Mail: D.Rokossa@hs-osnabrueck.de
Von: Holger Schleper
Weitere Fotos zur Nachricht