Laborausstattung
Labor für Handhabungstechnik und Robotik
Laborausstattung
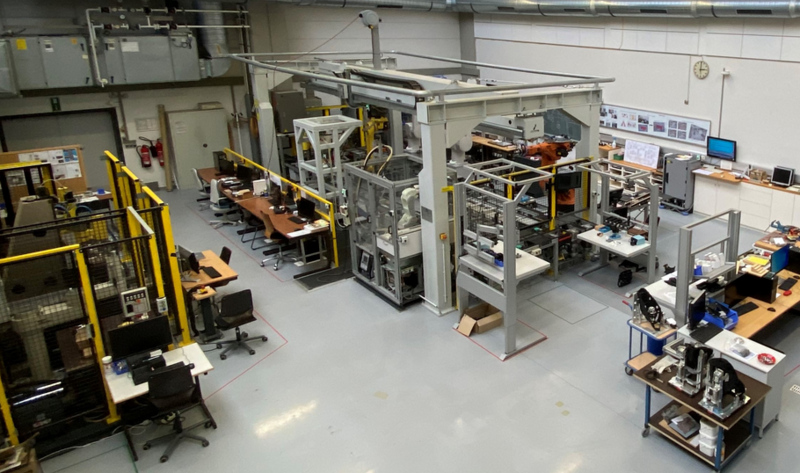
Insgesamt 12 Roboter unterschiedlichster Größe und Leistungsklasse verschiedender Hersteller stehen im Labor für Handhabungstechnik und Robotik zur Verfügung. Sie werden überwiegend innerhalb eines vollautomatisierten Montagesystems auf Basis eines Doppelgurtband-Transfersystems eingesetzt. Weitere Roboter kommen in Einzelarbeitszellen für die Durchführung von Fräsarbeiten, Schweißversuchen, Pick&Place-Operationen und weiteren Handhabungsaufgabenstellungen hinzu. Ein mobiler Roboter verbindet dann noch einzelne Arbeitsplätze und Roboterstationen.
Einen Grundriss des Labors mit allen Robotern und Sicherheitseinrichtungen finden Sie hier.
Weiterhin stehen unterschiedlichste Simulatoren und Planungssysteme zur Verfügung, um rechnergestützt Aufgaben aus der Handhabungstechnik, Robotik und Montagetechnik bearbeiten zu können. Alle Roboter und Betriebsmittel liegen dabei bereits als Modelle vor, so dass bei anstehenden Untersuchungen direkt zwischen Simulation und Realität gewechselt werden kann.
Nachfolgend eine Übersicht zu der zur Verfügung stehenden Hard- und Software:
Hardware

Der Industrieroboter Fanuc M-20iA der Fa. Fanuc ist ein Vertikal-Knickarmroboter mit 6 rotatorischen Achsen und Zentralhandkinematik. Die Zentralhand ist als 'Hollow Wrist' ausgelegt, es können also sämtliche Versorgungsleitungen für die angeflanschten Endeffektoren durch das Handgelenk verlegt werden.
Eigenschaften:
- Handhabungskapazität: 20 kg
- Max. Reichweite (bezogen auf den Handachsenschnittpunkt):
1811 mm - Wiederholgenauigkeit: <±0,08 mm
- Gewicht des Manipulators: 250 kg
Der Roboter ist im Labor über Kopf an einer 8m langen Linearachse montiert. Das hierdurch entstehende redundante 7-Achsensystem bietet eine Vielzahl Bewegungsmöglichkeiten.

Der Industrieroboter KR 60-3 der Fa. KUKA ist ein Vertikal-Knickarmroboter mit 6 rotatorischen Achsen und Zentralhandkinematik. Er wird mit der Kuka-Steuerung KR C4 betrieben.
Eigenschaften:
- Handhabungskapazität: 60 kg (Zusatzlast von 35 kg auf Oberarm montiert möglich)
- Max. Reichweite (bezogen auf den Handachsenschnittpunkt):
2033 mm - Wiederholgenauigkeit: <±0,20 mm
- Gewicht des Manipulators: 665 kg

Der Industrieroboter RX 130 der Fa. Stäubli ist ein Vertikal-Knickarmroboter mit 6 rotatorischen Achsen und Zentralhandkinematik. Bei den im Labor existierende beiden Robotern handelt es sich um ehemalige Lackierroboter (Option 'Paint'). In der Robotersteuerung kann hierzu eine spezielle Applikation zur Einrichtung von Lackieraufgaben gestartet werden. Weiterhin wird der Manipulator mit Überdruck belüftet, um den Explosionsschutz (Ex-Schutz) zu gewährleisten. Im Labor werden die RX 130 nicht für Lackierzwecke eingesetzt. In Kinematik, Bedienung und Programmierung unterscheidet er sich daher nicht vom 'normalen' RX 130.
Eigenschaften:
- Handhabungskapazität: 12 kg (bei reduzierter Geschwindigkeit: 20 kg)
- Max. Reichweite (bezogen auf den Handachsenschnittpunkt): 1250 mm
- Wiederholgenauigkeit: <±0,03 mm
- Gewicht des Manipulators: 238 kg

Der Industrieroboter RS005L aus der R-Serie der Fa. Kawasaki ist ein Vertikal-Knickarmroboter mit 6 rotatorischen Achsen und Zentralhandkinematik. In der L-Ausführung hat der Roboter einen verlängerten Oberarm (4. Gelenkkörper), kann bis 5 kg Last aufnehmen und hat dabei eine Eigenmasse von 35 kg. Die Programmierung erfolgt in der Sprache AS, die der Programmiersprache V+ der Stäubli-Roboter und des AdeptOne stark ähnelt.
Eigenschaften:
- Handhabungskapazität: 5 kg
- Max. Reichweite (bezogen auf den Handachsenschnittpunkt): 903 mm
- Wiederholgenauigkeit: <±0,03 mm
- Gewicht des Manipulators: 35 kg

Der Roboter UR5e der Firma Universal Robots gehört zur Familie der kollaborierenden Roboter. Er zeichnet sich durch einfache Programmierung ("Programmieren durch Vormachen") und Überwachung der Kontaktkraft beim Betrieb aus. Hierdurch darf er auch ohne Schutzeinhausungen in direkter Zusammenarbeit mit dem Menschen eingesetzt werden.
Im Labor existieren 2 UR5-Roboter, von denen einer - aufgesetzt auf der mobilen Transportplattform MiR 200 - als mobiler Roboter eingesetzt wird.
Eigenschaften:
- Handhabungskapazität: 5 kg
- Max. Reichweite: 850 mm
- Wiederholgenauigkeit: <±0,1 mm
- Gewicht des Manipulators: 18,4 kg

Der Mitsubishi-Roboter RV-5AS-D ist ein 6-Achsen Knickarmroboter, der in industriellen Anwendungen universell einsetzbar ist. Als kollaborierender Roboter darf er innerhalb einer Applikation auch ohne klassische Schutzeinhausungen betrieben werden.
Eigenschaften:
- Handhabungskapazität: 5 kg
- Max. Reichweite (bezogen auf den Handachsenschnittpunkt):
910 mm - Wiederholgenauigkeit: <±0,05 mm
- Gewicht des Manipulators: 32 kg

Der Industrieroboter AdeptOne (Typ 840) wurde ehemals von der Fa. Adept entwickelt und vertrieben. Adept wurde 2015 von dem Unternehmen Omron übernommen. Der AdeptOne ist ein Horizontal-Knickarmroboter mit 4 Achsen in SCARA-Bauweise. Der AdeptOne war der erste serienreife Industrieroboter mit Direktantrieben.
im Labor wird er für Fräsarbeiten in einer eigenen Roboterzelle eingesetzt.
Eigenschaften:
- Handhabungskapazität: 9 kg
- Max. Reichweite: 800 mm
- Wiederholgenauigkeit: 0,025 mm (in xy-Ebene), 0,05 mm (in z-Höhe)
- Gewicht des Manipulators: 180 kg

Der Industrieroboter IBM 7545 der Fa. IBM ist ein Horizontal-Knickarmroboter mit 4 Achsen in SCARA-Bauweise. Von diesem Robotertyp existieren im Labor 4 Geräte.
IBM hat seine Sparte 'Industrieroboter' vor vielen Jahren eingestellt. Diesen Roboter findet man daher nur noch vereinzelt in wenigen Firmen und Hochschullaboren.
Eigenschaften:
- Handhabungskapazität: 1 kg (bei reduzierter Geschwindigkeit: 10 kg)
- Max. Reichweite: 650 mm
- Wiederholgenauigkeit: <± 0,05 mm
- Gewicht des Manipulators: 107 kg
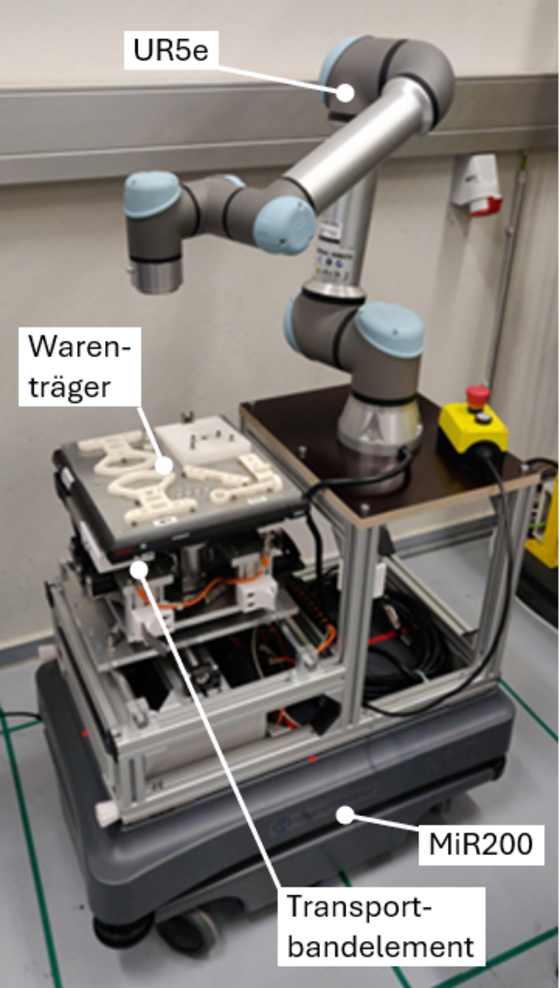
Der MiR 200 ist ein mobiler Roboter für Transport- und Logistikaufgaben innerhalb von Gebäuden.
Im Labor wurde ein UR5e-Roboter auf den MiR aufgesetzt und eine Übergabeeinheit für das Doppelgurt-Bandsystem integriert. Hierdurch entsteht ein vollwertiger autonomer mobiler Roboter für Transport-, Handlings- und Montagearbeiten - der HS-MobiRob.
Eigenschaften:
- Länge x Breite x Höhe: 890 mm x 580 mm x 352 mm
- Nutzlast: 200 kg
- Gewicht (ohne Ladung): 70 kg
- Reichweite: > 10 Stunden (durch die Verwendung eines leistingsstärkeren Akkus)
- Höchstgeschwindigkeit: Vorwärts: 1,1 m/s (4 km/h) / rückwärts: 0,3 m/s (1 km/h)

Das Transfersystem der Firma Bosch Rexroth ist ein Doppelgurtband-System für den Transport von Warenträgern der Größe 320 mm x 320 mm. Im Labor ist es als rechteckiges System mit 2 Querbändern und 3 Längsbändern aufgebaut. 2 Längsbänder verlaufen direkt nebeneinander, wodurch Überholszenarien für die Warenträger möglich sind. Weiterhin ist das System mit Hub-Positioniereinrichtungen und Hub-Quereinrichtungen ausgestattet.
Eigenschaften:
- Abmessung des Gesamtsystems: 8 m x 2,5 m
- Anzahl Hub-Positioniereinrichtungen: 7 Stück
- Anzahl Hub-Quereinrichtungen: 14 Stück

Der im Labor existierende Vibrationswendelförderer der Firma fimotec-fischer wurde mechanisch verändert, so dass für den Versuchsbetrieb einzelne Ordnungsschikanen ausgewechselt werden können. Dadurch ist er umrüstbar und kann zum Ordnen eines breiten Werkstückspektrums eingesetzt werden.
Angesteuert wird der Vibrationswendelförderer durch das Steuergerät TRL 01 des gleichen Herstellers.

Die vollautomatische Blindnietanlage GAV-electronic besteht aus einer Versorgungseinheit und einer Blindnietpistole, die beide über ein flexibles Schlauchpaket verbunden sind. Die Versorgungseinheit beinhaltet die Steuerung, zwei hydraulische Druckübersetzer, eine Blindniet-Fördereinheit und ein Restdorn Absaugsystem mit Dornauffangbehälter.
Beim Betätigen der Blindnietpistole wird der im Mundstück bereitgestellte Blindniet verarbeitet, der abgerissene Blindnietdorn in den Auffangbehälter befördert und der Nachladevorgang automatisch ausgelöst. Die Schwingfördereinheit sorgt für die kontinuierliche Bereitstellung der Blindniete.
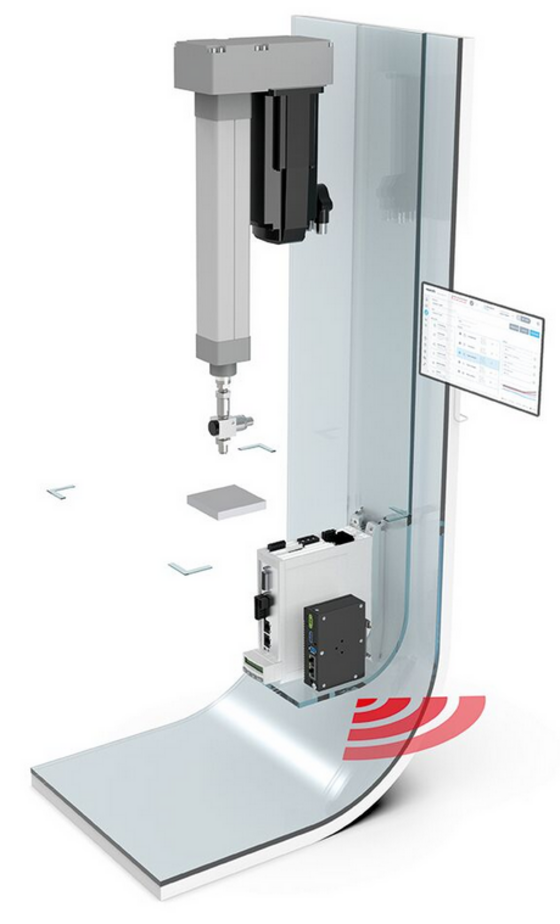
Der Servopressen-Baukasten Smart Function Kit ist für vielfältige Press- und Fügeanwendungen geeignet. Die webbasierte Software ermöglicht sowohl die Erstellung einer Ablaufsequenz per Drag & Drop von Sequenzbausteinen, als auch die Aufzeichnung des Kraft-Weg-Verlaufs und dessen anschließende Bewertung (OK/NOK) durch
Hüllkurven, Fenster und Grenzwerte.
Die Servopresse bietet ein Kraftspektrum bis 70 kN für Montage- und Fügeprozesse, Umformtechnik sowie Prüf- und Testanwendungen.
Software
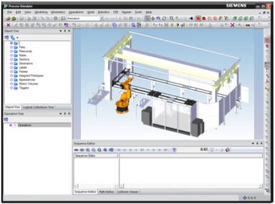

Das Simulationsprogramm Process Simulate der Fa. Siemens ermöglicht die simulationsgestützte Untersuchung von industriellen Arbeitszellen. In den beiden Ausprägungen 'Robotics' und 'Human' kann es für unterschiedliche Untersuchungsschwerpunkte eingesetzt werden: So können zum einen Roboterarbeitszellen offline geplant und simuliert werden und dabei die notwendigen Roboterprogramme ohne den direkten Kontakt zum jeweiligen Roboter generiert werden. Es können so z.B. Bewegungssimulationen mit Blick auf Erreichbarkeit und mögliche Kollisionen durchgeführt werden. Für die im Labor existierenden Roboter können durch Einsatz entsprechender RCS-Module (Robot-Controller-Simulation) auch realistische Simulationen (RRS) durchgeführt werden, wodurch höhere Genauigkeiten hinsichtlich Taktzeit und Bewegungsbahn erzielt werden.
Durch Integration des digitalen Menschmodells 'Jack' können ebenfalls manuelle Arbeitstätigkeiten unter ergonomischen Aspekten (z.B. Erreichbarkeiten, Sichtfelder, Belastung einzelner Körperregionen) analysiert werden. Typische Analysewerkzeuge sind hierbei: OWAS-, NIOSH- und EAWS-Studien.
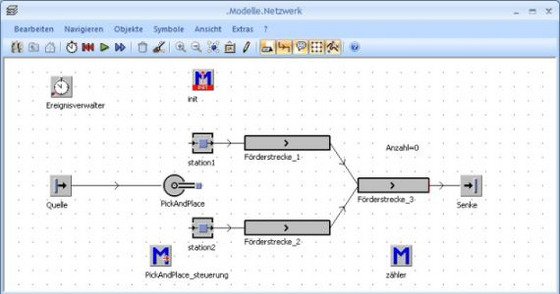
Das Programm Plant Simulation der Fa. Siemens gehört zur Gruppe der ereignisorientierten Simulatoren und ist damit geeignet, sämtliche Abläufe innerhalb eines Unternehmens abzubilden. Primär wird es für die Simulation von Materialflüssen und Montageabläufen in Produktionsbereichen eingesetzt.So können Produktionsabläufe in ganzen Fabriken betrachtet werden oder auch die Montage eines Produkten in einem manuellen Montagesystem.
Plant Simulation ist gekennzeichnet durch ein Baukastensystem einzelner Simulationskomponenten, die eine einfache und schnelle Modellerstellung ermöglichen.
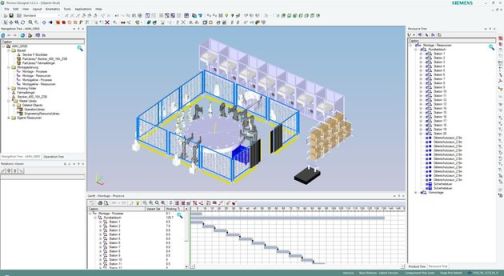
Die Programmumgebung Process Designer erlaubt die Planung und Verwaltung von Produktionslinien oder einzelnen Arbeitsabläufe innerhalb von Fertigungen und Montagen. Das Programm Process Designer ist als Datenbankapplikation aufgebaut und verwaltet Produkt-, Prozess- und Ressourceninformationen zu den einzelnen Produktionsabläufen. Der Process Designer kommt von der Fa. Siemens (vormals UGS) und kann in Abhängigkeit der Unternehmensbedürfnisse im Detail von seinen Funktionen her angepasst werden.
Im Labor können mit Process Designer Montageplanung und Austaktungen von robotergestützten und manuellen Montageabläufen durchgeführt werden.
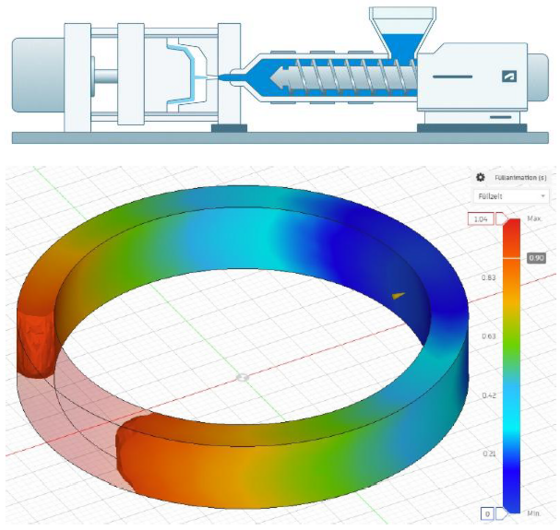
Autodesk Fusion ist eine von Fa. Autodesk bereitgestellte integrierte und cloudbasierte 3D-Modellierungsplattform für CAD, CAM, CAE und PCB zur Entwicklung beliebiger Entwürfe und Konstruktionen. Fusion ist ein häufig genutztes Werkzeug in den Bereichen Fertigung, Bearbeitung, Ingenieurwesen und Industriedesign.
Fusion kann im Labor für berechtigte Lehrkräfte und Studierende kostenlos genutzt werden und wird innerhalb der Lehrveranstaltungen für Konstruktion, Spritzgießsimulation und CAM-Programmierung des ADEPT-Fräsroboters eingesetzt.