Studium und Lehre
Labor für Handhabungstechnik und Robotik
Projekte und Studienarbeiten Sommersemester 2026
Im Labor für Handhabungstechnik und Robotik werden auch im Sommersemester 2026 wieder Projekte und Studienarbeiten für Studierendenteams aller Studiengänge angeboten. Der jeweilige Arbeitsaufwand - auch im Hinblick auf die zu erwerbenden Leistungspunkte - kann dabei abgestimmt werden.
Für alle Projektarbeiten gilt: Eine Bearbeitung im Team ist erwünscht. Die Teilnahme an den Lehrveranstaltungen zur Robotik, Montagetechnik oder Simulationswerkzeugen ist dabei nicht zwingend erforderlich - erleichtet bei einigen Projekten aber ggf. den Einstieg in die jeweilige Aufgabenstellung.
Bei Fragen zu den einzelnen Themen nehmen Sie bitte Kontakt via Email auf.
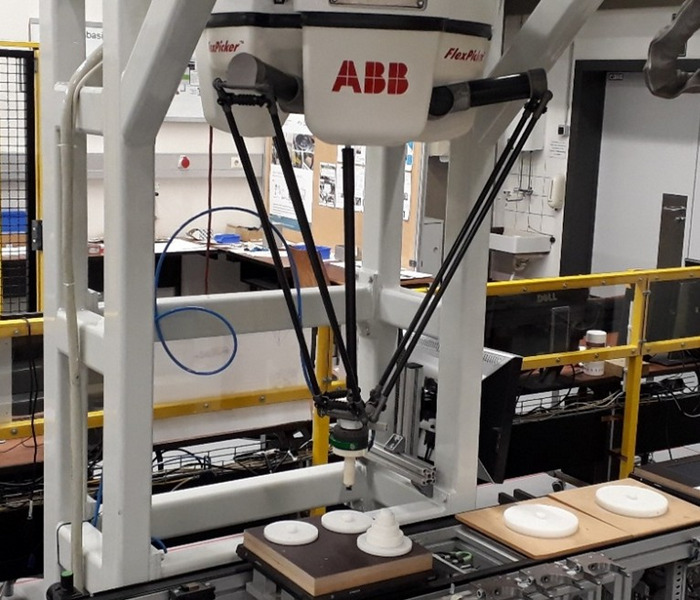

Im Labor für Handhabungstechnik und Robotik steht innerhalb des robotergestütztes Montagesystem mit insgesamt 7 Industrierobotern auch der Hochgeschwindigkeitsroboter ABB IRB 360 FlexPicker. Er zeichnet sich durch seine besonders hohen Beschleunigungs- und Geschwindigkeitswerte aus und eignet sich daher insbesondere für hochdynamische Pick-and-Place-Aufgaben in industriellen Anwendungen.
Im Rahmen dieser Projekt- oder Studienarbeit soll die automatisierte Anfertigung von sogenannten Nagelbildern mithilfe des FlexPickers realisiert werden. Ziel ist dabei die ganzheitliche Umsetzung eines automatisierten Prozesses – beginnend bei der mechanischen Gestaltung eines geeigneten Werkstückträgers bis hin zur Programmierung des Roboters, der Integration in das bestehende Montagebandsystem und einer möglichen Ergebnisinspektion mittels Kamera.
Einzelne Aufgaben in diesem Projekt können sein:
- Analyse der Aufgabenstellung und Ableitung geeigneter technischer Anforderungen an den Gesamtprozess
- Gestaltung und Herstellung eines geeigneten Werkstückträgers zur Aufnahme der Nägel und zur Realisierung eines reproduzierbaren Nagelbildes
- Integration des Werkstückträgers in das vorhandene Montagebandsystem des Roboterlabors
- Programmierung des ABB IRB 360 FlexPickers zur automatisierten Platzierung der Nägel entsprechend eines gewählten Nagelbildes
- Gestaltung eines User-Interfaces für die Eingabe möglicher Nagelbildmotive
- Prüfung der Nagelbildergebnisse mit einer Kamera
- Inbetriebnahme, Test und Optimierung des Gesamtsystems unter Laborbedingungen
Die Projekt-/Studienarbeit kann von maximal 6 Studierenden in Teamarbeit bearbeitet werden. Abhängig von der Personenzahl kann die Aufgabenstellung angepasst werden.
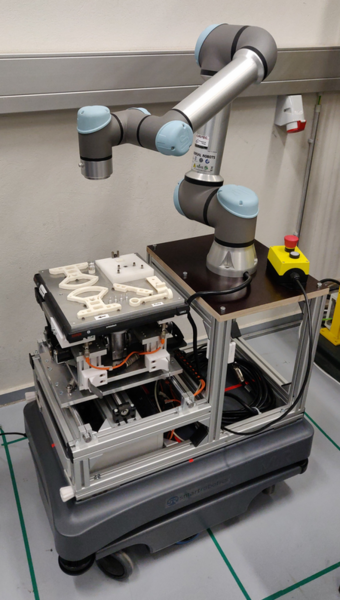
Im Labor für Handhabungstechnik und Robotik existiert ein mobiler Transport- und Montageroboter, der HS-MobiRob. Er besteht aus dem Transportroboter MiR200, auf den ein UR5e-Roboter und ein Transportbandelement aufgesetzt wurden. Das gesamte Robotersystem mit den Möglichkeiten eines Transports von Warenträgern im Labor und der Durchführung von Montagearbeiten auf den transportierten Warenträgern soll in weitere Labor-Produktionsszenarien und damit in die Smart Factory der Hochschule eingebunden werden. In vorhergehenden studentischen Projektarbeiten wurde bereits die Kommunikation zwischen dem HS-MobiRob und dem restlichen Montagesystem im Labor zu großen Stücken erledigt. Ebenso wurde das Andocken des Transportroboters an das Montagesystem realisiert (-> Video).
Ziel dieser Projektarbeit ist nun die Entwicklung und Inbetriebnahme weiterer Montageszenarien im Labor für Handhabungstechnik und Robotik. Dazu müssen ggf. weitere Aufbauten für den HS-MobiRob entworfen und zusammen mit der Betriebswerkstatt der Hochschule gebaut werden. Ebenso müssen Montagebewegungen für den UR5e-Roboter programmiert werden und neue Routen für den Transportroboter im Labor eingerichtet werden. Schließlich soll ein Gesamtszenario (Montagearbeiten im Montagesystem zusammen mit Materialbewegungen mittels Transportroboter) entworfen und realisiert werden.
Die Projektarbeit kann von 2 bis 6 Studierenden in Teamarbeit bearbeitet werden. Abhängig von der Personenzahl kann die Aufgabenstellung angepasst werden.

Im Labor für Handhabungstechnik und Robotik bildet ein Doppelgurtband-Transportsystem der Firma Bosch Rexroth die Basis des installierten automatischen Montagesystems. Mit dem Transportsystem werden die einzelnen Warenträger mit ihren Montageobjekten zu den jeweiligen Roboterstationen bewegt. Beim Wechsel der Warenträger an einer jeden Roboterstation muss der vorgehende Warenträger die Station zunächst verlassen, damit der bereits wartende Warenträger in die Station übergesetzt werden kann. Hierdurch geht bedingt durch die geringe Bandgeschwindigkeit (18 m/min) wertvolle Taktzeit verloren. Schnelleinzüge (auch Werkstückträger-Booster genannt) reduzieren dieses Problem, da sie die Warenträger unabhängig von der Bandgeschwindigkeit im Umfeld einer Roboterstation schneller bewegen.
In einer vorhergehenden Projektarbeit wurde bereits ein Schnelleinzug speziell für das Montagesystem im Labor konstruiert und prototypisch getestet. Mögliches Verbesserungspotenzial hinsichtlich Funktionalität, aber auch mit Blick auf Material- und Installationskosten wurde dabei sichtbar.
Das Ziel dieser Projekt- oder Studienarbeit ist eine grundlegende Analyse der bisherigen Arbeiten und die Ableitung von Optimierungspotenzialen. Dabei sollen generierte Ideen auch immer prototypisch in Zusammenarbeit mit der Betriebswerkstatt der Hochschule realisiert und praktisch in Versuchsläufen erprobt werden. Handwerkliches Geschick ist hierbei sicherlich von Vorteil.
Die Projekt- oder Studienarbeit kann von 2 - 5 Studierenden bearbeitet werden. Abhängig von der Teilnehmeranzahl kann die Aufgabenstellung angepasst werden.
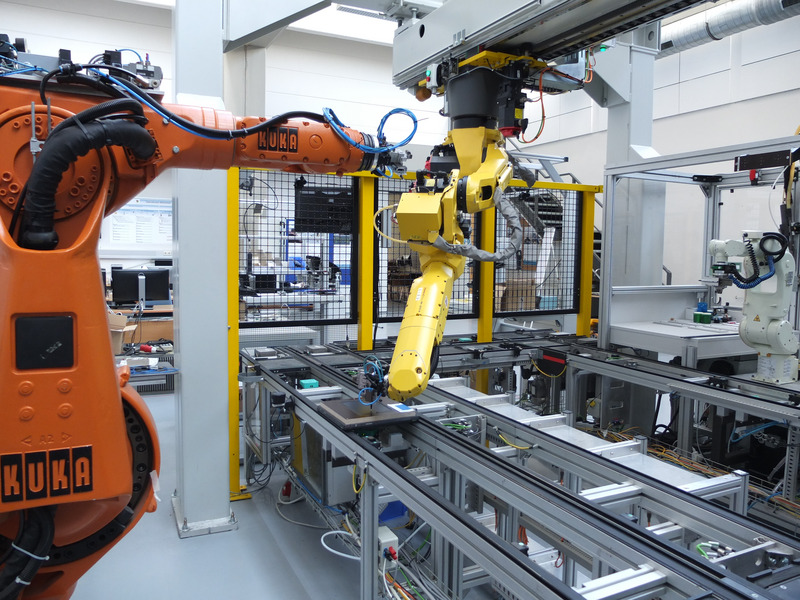
Im Labor für Handhabungstechnik und Robotik ist als Teil der Smart Factory an der Hochschule Osnabrück ein automatisch arbeitendes Montagesystem installiert. Es besteht aus einem Doppelgurtbandsystem als Warenträgerumlaufsystem der Firma Bosch Rexroth zusammen mit insgesamt 7 Industrierobotern unterschiedlicher Hersteller. Alle Abläufe im Montagesystem werden über ein cyber-physisches System intelligent über auswählbare Montage- und Auslastungsstrategien koordiniert. In einer vergangenen Projektarbeit wurden zuletzt auch alle Roboter dahingehend erweitern, dass Sie permanent ihre Gelenkwinkelstellungen zur weiteren Verwendung in einem eigenen Netzwerk bereitstellen.
Ziel dieser Projektarbeit ist nun die Realisierung geeigneter Online-Visualisierungsmöglichkeiten für das gesamte Montagesystem. Dabei sollen sowohl die Bewegungen aller Roboter dargestellt werden, als auch der Aufenthaltsort der einzelnen Warenträger auf dem Bandsystem. Schließlich sollen diese Daten für z.B. eine Kollisionsüberwachung zwischen den einzelnen Robotern einschließlich Warnmechanismus genutzt werden. Die Verwendung bestehender Visualisierungswerkzeuge und auch Simulatoren (z.B. Process Simulate) ist prinzipiell gewünscht.
Diese Projekt- oder Studienarbeit kann von 3 - 5 Studierenden bearbeitet werden. Programmierkenntnisse und Kenntnisse zum effizienten Datenaustausch in Rechnernetzen erleichtet den Einstieg in diese Projektarbeit. Abhängig von der Teilnehmeranzahl kann die Aufgabenstellung angepasst werden.