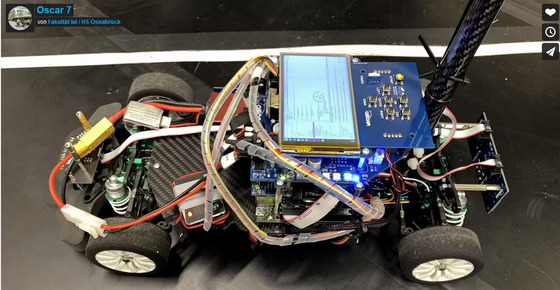
OSCAR 7 – Autonomes Modellauto
Studentische Projektleitung:
- Till Meeske, Elektrotechnik (M.Sc.)
Projektteam:
- Nico Brönstrup, Technische Informatik (B.Sc.)
- Markus Düthmann, Elektrotechnik (B.Sc.)
- Christian Fabrizius, Elektrotechnik (B.Sc.)
- Patrick Flacke, Elektrotechnik (M.Sc.)
- Simon Giese, Elektrotechnik (M.Sc.)
- Nils Kirschke, Elektrotechnik (M.Sc.)
- Sören Langenberg, Technische Informatik (B.Sc.)
- Franka Meyer, Technische Informatik (B.Sc.)
- Kirstin Möller, Elektrotechnik (B.Sc.)
- Christian Pleuß, Elektrotechnik (B.Sc.)
- Niklas Rahenbrock, Technische Informatik (B.Sc.)
- Marcel Reimer, Elektrotechnik (B.Sc.)
- Filip Subeski, Medieninformatik (B.Sc.)
- Nils van Neerven, Elektrotechnik (B.Sc.)
- Jan Weimar, Medieninformatik (B.Sc.)
Module:
- Elektrotechnik-Projekt (BTE)
- Software Engineering Projekt (BTI, BMI)
- Projekt (MET)
Betreuer:
- Prof. Dr. Winfried Gehrke
Autonomes Fahren ist in der Automobilbranche eines der treibenden Themen der letzten Jahre. In Zukunft sollen Autos ohne Fahrzeugführer in der Lage sein, am Straßenverkehr teilzunehmen. Im Projekt OSCAR werden mittlerweile seit acht Jahren Modellautos im Format 1:10 eines realen Autos entwickelt, welche genau diese Aufgabe auf einer realitätsnahen Teststrecke bestreiten.
Mit OSCAR 7 wird derzeit an der siebten Generation des Autos gearbeitet. Im Wintersemester 2021/22 beteiligen sich insgesamt 16 Studierende aus der Elektrotechnik und der Informatik, sowohl aus Bachelor- als auch aus Masterstudiengängen, an dem Projekt.
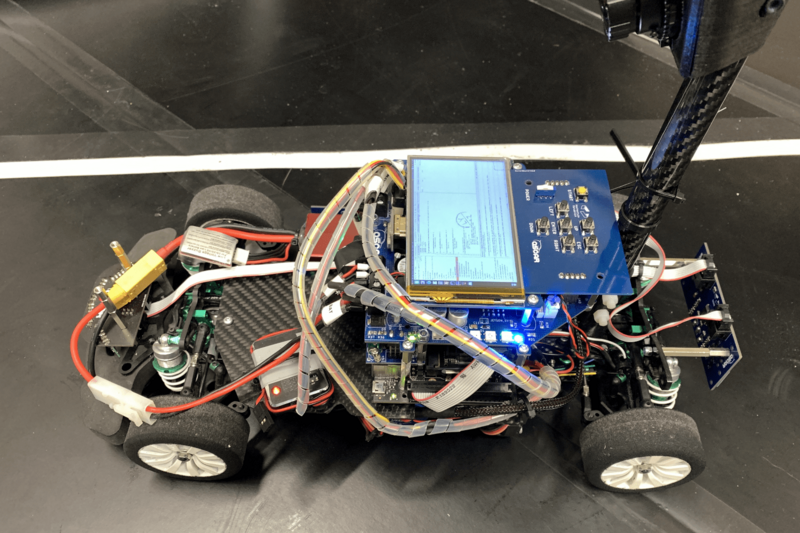
Während in vorangegangenen Projekten die Hardwareentwicklung der neuesten OSCAR-Generation weitestgehend abgeschlossen wurde, musste dieses Semester die Software fast von Grund auf neu konzeptioniert und geschrieben werden. Um diese Aufgabe zu bewältigen, haben sich die Studierenden in Subteams aufgeteilt, um parallel an den wichtigsten Arbeitspaketen arbeiten zu können. Diese Arbeitspakete lassen sich wie folgt zusammenfassen:
- Fahrspurerkennung: Aus Bildern, die eine am Auto angebrachte Kamera aufzeichnet, müssen die Fahrspurmarkierungen gefunden und als solche identifiziert werden, um den zu fahrenden Weg zu ermitteln.
- Objektdetektion: Anhand der Bilder müssen Fahrbahnmarkierungen, wie Stopplinien oder Zebratreifen, sowie Objekte auf der Fahrbahn erkannt werden. Dies wird durch die Nutzung von künstlicher Intelligenz, genauer gesagt, einem neuronalen Netzwerk erzielt.
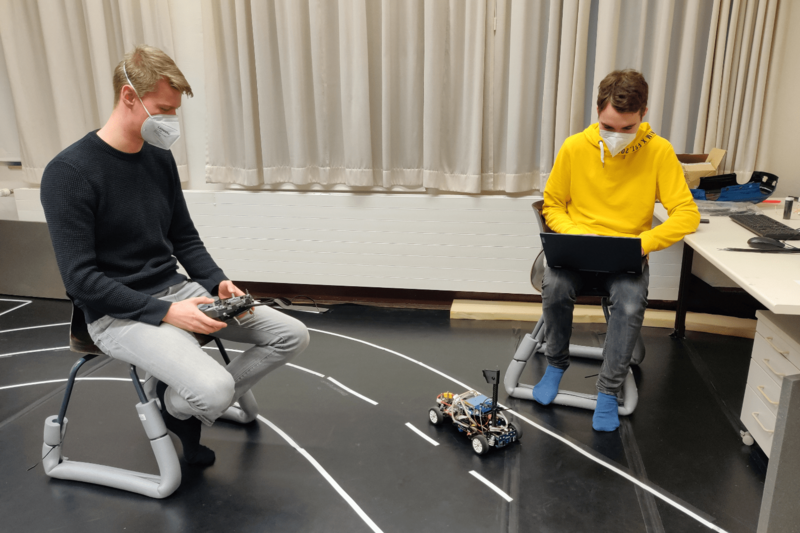
- High Level Control: In diesem Arbeitspaket wird das Fahrverhalten, abhängig von den Eingangsdaten der Sensoren, der Fahrspurerkennung und der Objektdetektion, vorgegeben und auf dem Auto implementiert.
- Hardware: Verschiedenste Arbeiten rund um die Spannungsversorgung, die Mikrocontroller, die Karosserie und die Sensoren wurden in diesem Arbeitspaket behandelt.
"Neben den technischen Herausforderungen, wie zum Beispiel der Echtzeitfähigkeit des Codes, war vor allem auch die Organisation des verhältnismäßig großen Teams eine Herausforderung", erklärt der studentische Projektleiter Till Meeske. Subteam-Koordinator Nils Kirschke ergänzt: "Durch die Nebenläufigkeit im Code konnten wir erreichen, dass die Ermittlung der Eingangsdaten und die Berechnung der Stellwerte autonom voneinander erfolgen und das Auto so möglichst schnell reagieren kann."
Projektbilder

Projektvideo