Digitaler Zwilling einer Misch- und Abfüllanlage
Elektrotechnik-Projekt
Studentische Projektleitung:
-
Yannalh Gageler, Elektrotechnik (B. Sc.)
-
Timo Göttig, Elektrotechnik (B. Sc.)
Projektteam:
-
Sami Alhamwi, Elektrotechnik (B. Sc.)
-
Jannis Bensmann, Elektrotechnik (B. Sc.)
-
Bernhard Dierkes, Elektrotechnik (B. Sc.)
-
Patrick Heyens, Mechatronik (B. Sc.)
-
Jonas Wessels, Elektrotechnik (B. Sc.)
-
Max Wolting, Elektrotechnik (B. Sc.)
Modul: Elektrotechnik-Projekt
Betreuer:
-
Prof. Dr. Siegmar Lampe
Die Aufgabe des Projektteams bestand darin, eine bestehende Misch- und Abfüllanlage in einen Digitalen Zwilling zusammenzufassen. Die Aufgabenteilung setzte sich aus drei Arbeitsgruppen zusammen:
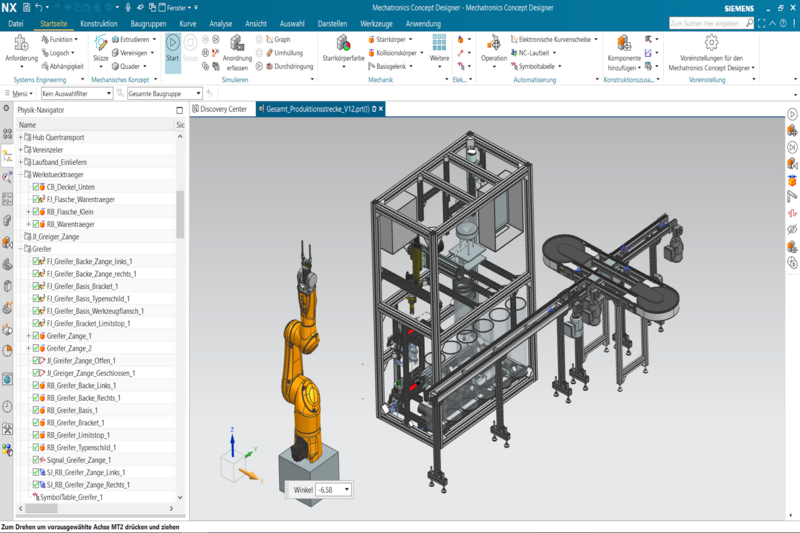
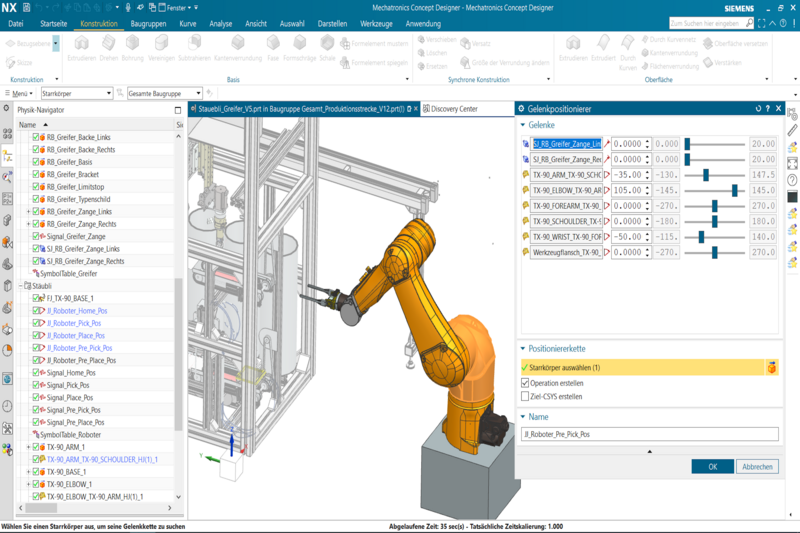
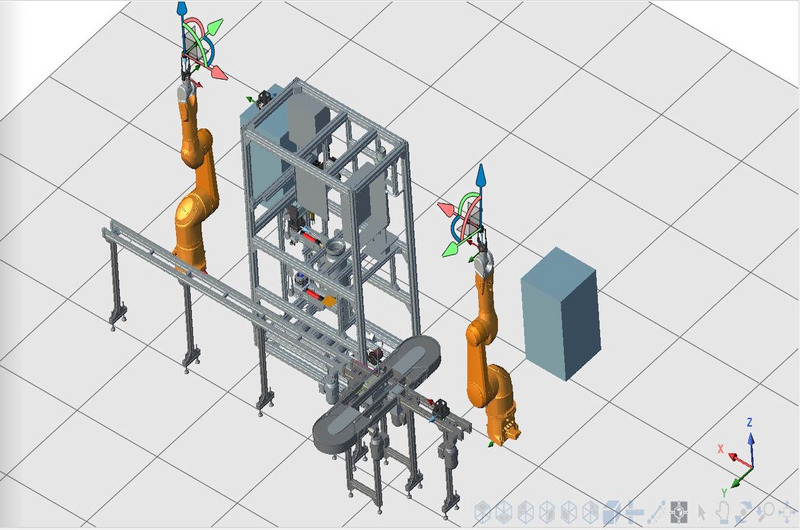
- Die erste Arbeitsgruppe befasste sich mit dem Rexroth-Transportsystem und der Ansteuerung des Roboters von Stäubli. Hierbei wurde das gesamte Transportband sowie alle zugehörigen Komponenten in Siemens NX Mechatronic Concept Designer erstellt. Den CAD und CAE-Daten wurden physikalische Eigenschaften sowie Signale zugeteilt. Im nächsten Schritt fand die Verknüpfung der Signale mit den Steuersignalen in dem Siemens TIA-Portal statt, um die Anlage aus der Steuerungssoftware heraus zu bedienen. Abschließend fusionierte die Arbeitsgruppe die Produktionsanlage, das Transportsystem und den Roboter zu einer Gesamtanlage.
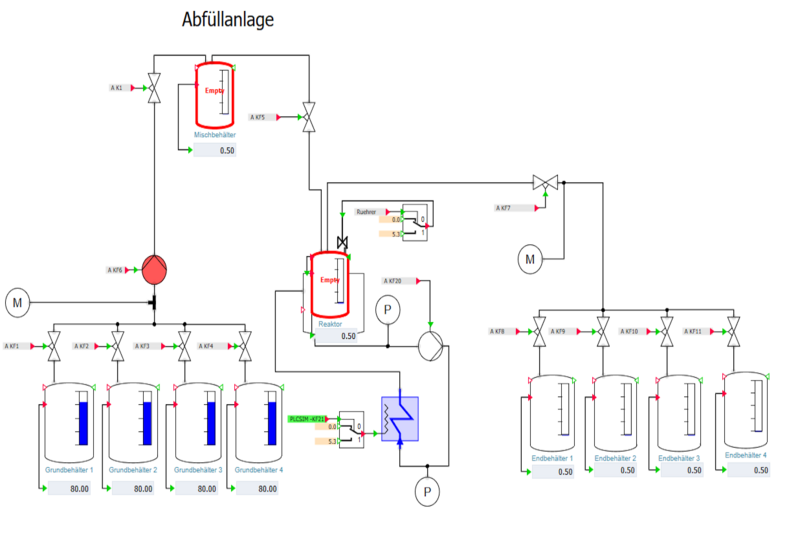
- Die zweite Arbeitsgruppe erstellte in der Software SIMIT 10.3 einen digitalen Zwilling der realen Abfüllanlage. Die Software ermöglicht es, sämtliche Füllstände sowie Flüssigkeitsbewegungen so zu modellieren, dass diese dasselbe Verhalten wie die Anlage in der Realität aufweisen. Die einzelnen Systemkomponenten, wie z. B. Ventile, Pumpen oder Behälter, wurden parametrisiert und entsprechend miteinander verbunden. Um die einzelnen Komponenten ansteuern zu können, sind diese jeweils mit den dazugehörigen Signalen verknüpft worden. Durch eine Schnittstelle ist die Möglichkeit gegeben, die Ein- und Ausgangssignale der Software, TIA Portal und SIMIT, so zu verknüpfen, dass der Abfüllprozess schlussendlich automatisiert abläuft.
- Die dritte Arbeitsgruppe hat sich, wie die erste Arbeitsgruppe, mit dem Roboter beschäftigt. Allerdings sollte die Steuerung und Programmierung des Roboters mit dem hauseigenen Programm des Herstellers „Stäubli Robotics Suite 2019“ erfolgen. Der Roboter wurde im Programm als digitaler Zwilling aufgebaut und programmiert. Nach der virtuellen Inbetriebnahme wurde die Ablaufsteuerung auf das reale Umfeld angewendet. Vordergründig war hierbei die Ergründung der Software von Stäubli sowie die Anfertigung einer Anleitung dieses Programms.
Projektbilder
Projektvideo
